3.1.4. Adaptive Modification of Local Contrast and Local Luminance Mean
In some applications, it is desirable to modify the local contrast and local luminance mean as the local characteristics of an image vary. In such applications, it is reasonable to process an image adaptively.
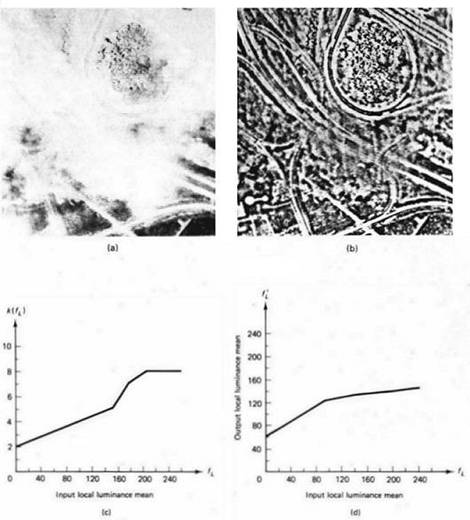
One application in which adaptive modification of the local contrast and local luminance mean is used is enhancement of an image taken from an airplane through varying amounts of cloud cover. According to one simple model of image degradation due to cloud cover, regions of an image covered by cloud have increased local luminance mean due to direct reflection of the sunlight by cloud cover and decreased local contrast due to attenuation of the signal from the ground when it passes through the cloud cover. One approach to enhancing the image, then, is to increase the local contrast and decrease the local luminance mean whenever cloud cover is detected. One way to detect the presence of cloud cover is by measuring the local luminance mean. When the local luminance mean is high, it is likely that cloud cover is present.
One system developed to reduce the effect of the cloud cover is shown in Figure 3.12. This system modifies the local contrast and the local luminance mean. In the figure, f(n1,n2) denotes the unprocessed image. The sequence fL(n1,n2) which denotes the local luminance mean of f(n1,n2) is obtained by lowpass filtering f(n1,n2). The sequence fH(n1,n2) which denotes the local contrast, is obtained by subtracting fL(n1,n2) from f(n1,n2). The local contrast is modified by multiplying fH(n1,n2) with k(fL), a scalar that is a function of fL(n1,n2). The modified contrast is denoted by f’H(n1,n2) if k(fL) is greater than one, the local contrast is increased, while k(fL) less than one represents local contrast decrease. The local luminance mean is modified by a point nonlinearity, and the modified local luminance mean is denoted by f’L(n1,n2). The modified local contrast and local luminance mean are then combined to obtain the processed image, p(n1,n2). To increase the local contrast and decrease the local luminance mean when the local luminance mean is high, we choose a larger k(fL) for a larger fL, and we choose the nonlinearity, taking into account the local luminance mean change and the contrast increase. Figure 3.13 shows the result of applying the system in Figure 3.12 to enhance an image taken from an airplane through varying amounts of cloud cover. Figure 3.13(a) shows the original image of 256 x 256 pixels. Figure 3.13(b) shows the processed image. The function k(fL) and the nonlinearity used are shown in Figures 3.13(c) and 3.13(d). The lowpass filtering operation was performed by using an FIR filter whose impulse response is an 8 x 8-point rectangular window.
The system in Figure 3.12 can be viewed as a special case of a two-channel process. In the two-channel process, the image to be processed is divided into two components, the local luminance mean and the local contrast. The two components are modified separately and then the results are combined, in the system in Figure 3.12. the local luminance mean is modified by a nonuinearity, and the local contrast is modified by the multiplication factor k(fL). A two-channel process is also useful in image restoration and coding.
The notion of adapting an image enhancement system to changing local characteristics is generally a very useful idea that can be applied in a number of difterent contexts. For example, gray scale transformation and highpass filtering, discussed earlier, can be modified so that they adapt to some varying local characteristics. Even though an adaptive system often requires considerably more computations than a nonadaptive system. the adaptive systems performance is generally considerably better. It is worthwhile to explore adaptive systems in solving an image enhancement problem that requires high performance. Adaptive processing of images is also very useful in image restoration and coding.